SKARB-2401型 焊接機器人編程與維護實訓工作站(中級)
所屬類別:機器人系列
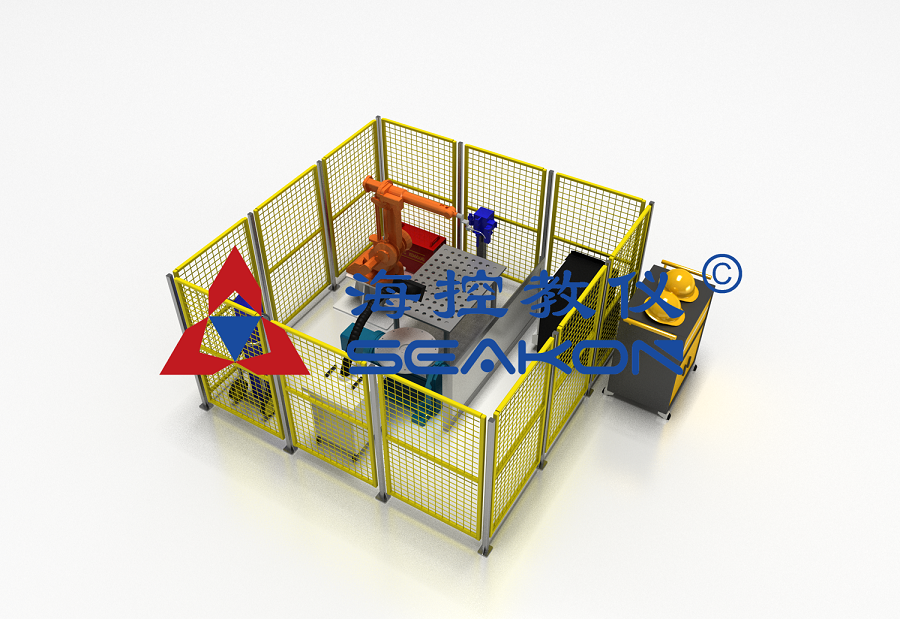
·設備外觀
·設計簡述
工作站以符合《焊接機器人編程與維護職業技能等級標準》考核內容為設計標準,采用模塊化配置。主要包括:焊接機器人單元、機器人安裝單元、電弧跟蹤單元、焊接電源單元、送絲機及焊槍單元、焊槍防撞單元、清槍剪絲單元、柔性工作臺單元、焊接夾具單元、雙軸變位機單元、擋弧光單元、煙霧凈化單元、焊接工件單元、編程學習板/TCP單元、氣體裝置單元、安全防護單元、實訓工具單元等。·主要參數
1、工作電源:三相四線 AC380V±10% 50Hz;
2、裝置容量:<18kVA;
3、實訓裝置尺寸:3000mm×3000mm×1500mm;(圍欄)
4、安全保護:具有接地、漏電壓、漏電流保護,安全指標符合國家標準。
·組成及功能
工作站主要由焊接機器人單元、機器人安裝單元、電弧跟蹤單元、焊接電源單元、送絲機及焊槍單元、焊槍防撞單元、清槍剪絲單元、柔性工作臺單元、焊接夾具單元、雙軸變位機單元、擋弧光單元、煙霧凈化單元、焊接工件單元、編程學習板/TCP單元、氣體裝置單元、安全防護單元、實訓工具單元等組成。·實訓項目
1)能正確完成焊接機器人系統各部分的安裝。
2)能正確完成焊接機器人系統中的機器人與焊機、焊機與焊槍、焊機與供氣裝置、焊接工裝、安全防護等硬件的連接。
3)能正確完成機器人與焊機、控制系統、周邊設備的軟件連接。
4)能正確完成焊接參數設置、工裝位置設置。
5)能正確使用功能健鈕與使能按鈕。
6)能設置示教盒語言與參數。
7)能手動操作工業機器人的單軸運動、線性運動。
8)能設定工業機器人運動速度并能切換手動操作運動模式。
9)能建立工業機器人工具、工件等坐標系,并測試其準確性。
10)能設置工業機器人工具數據和負載數據。
11)能查看工業機器人信息提示和事件日志。
12)熟知機器人焊接方法選擇。
13)熟知焊接機器人參數的用途和指令。
14)熟知機器人、焊機及周邊設備的通訊指令。
15)熟知焊接工件的最佳焊接位姿。
16)能對機器人焊接時工具坐標系的三點標定。
17)能對機器人焊接時工件坐標系設定。
18)能新建機器人焊接程序。
19)能示教機器人焊接程序。
20)能自動運行機器人焊接程序。
21)能設定和選擇焊接參數。
22)能備份工業機器人程序。
23)能備份工業機器人數據。
24)能備份焊接工藝程序。
25)能恢復焊接機器人程序和數據。
26)能復制相同焊接機器人程序人數據。
27)能加載焊接機器人程序。
28)能根據操作手冊的要求,進行工業機器人系統數據的定期備份。
29)能對工業機器人本體、控制柜、末端執行器和周邊設備進行除塵清潔。
30)能對工業機器人系統線纜、氣管進行清潔和整理。
31)能進行機器人的原點位姿恢復操作。
32)能根據安全生產要求填寫工業機器人系統維護保養記錄。
33)能夠對焊機、焊槍、送絲機正確清理。
34)能夠連接電纜的日常檢查保養。
35)能夠填寫日常維護保養報告。
36)能夠定期對清槍站進行表面清理和注油。
37)能夠定期對三維柔性臺進行日常維護與保養。
38)能夠對氣管、氣瓶進行日常測試。
39)能夠填寫周邊日常維護報告。
40)能夠對機器人本體、控制柜、進行定期檢查并及時處理存在的隱患。
41)能夠對焊接電源、焊槍、送絲機等進行檢查并及時處理存在的隱患;能按照規范制作定期維護保養日志。
42)能夠理解焊接工藝規范
43)能夠正確選擇焊接氣體及焊材
44)能夠確定初期工藝參數
45)能正確完成焊接機器人變位機線路連接。
46)能完成變位機調試
47)能完成變位機運行程序編寫
48)能正確完成機器人與變位機協調運行。
49)能正確選擇尋位方式
50)能正確完成電弧跟蹤程序編寫
51)能正確完成電弧跟蹤參數設置
52)能運行并修正電弧跟蹤程序
53)能正確設置多層多道焊接功能
54)能完成不含跟蹤的多層多焊接程序
55)能完成包含跟蹤的多層多道焊接功能
56)能優化程序運行路徑
57)對焊接成品外觀進行檢測
58)對焊接成品強度進行檢測
59)能夠對焊接缺陷進行分析處理
60)能夠更換焊接耗材
61)能夠預判潛在故障
62)能夠消除程序報警
63)能調試工作站協調運行。
